12 V paneel
Er zitten meerder devices in de boot waar behoorlijk wat software in zit. Zo heb je de motorsturing van Vetus en ons BMS van MG Systems. Maar er is nog een derde apparaat met meer dan een paar lijnen code; de Victron Cerbo GX. Victron noemt het zelf een “flexibel communicatiecentrum dat bewaking op afstand naar een hoger niveau tilt. Met alle aansluitmogelijkheden voor hardware die er nodig zijn”.
De Cerbo heeft in onze installatie enkele belangrijke rollen. De meest essentiële rol is echter het aansturen van de Victron Multiplus II als lader.

In onze oplossing met een beheerde CAN-bus BMS-accu ontvangt de Cerbo GX een laadspanningslimiet, laadstroomlimiet en ontladingsstroomlimiet van het MG Master LV BMS en geeft dat door aan de aangesloten Victron Multiplus II lader-omvormer. De Multiplus schakelt zijn interne laadalgoritme uit en volgt simpelweg de instructies van het BMS van de accu op. De lader is verbonden met de Cerbo GX met een VE.Bus-verbinding en het MG Master LV BMS met een VE.CAN-verbinding.
De tweede belangrijke rol voor de Cerbo GX is monitoren op afstand. Om alle data naar het Victron VRM-portal hebben we een Victron GX LTE 4G-modem aangesloten. Deze pusht om de zoveel minuten de data naar een omgeving zodat je vanaf de bank, voordat je gaat varen, kunt zien hoe vol bijvoorbeeld de accu’s zijn.
Het kleine beeldscherm is vooral handig om in de boot een hoop informatie te kunnen raadplegen. Ook kun je makkelijk even de lader/omvormer in- of uitschakelen en de laadstroom limiet aanpassen naar de maximale ampèrage walstroom dir beschikbaar is.
Tot slot hebben we een 12 V zekeringspaneel geplaatst. Daar is nu alleen de voeding van het Vetus V-CAN CAN-bus-systeem op aangesloten. We hebben besloten om een autonoom en groter 12 V systeem achter in de boot te plaatsen voor de twee bilge pompen.
Besturing
De besturing van onze Vetus E-line motor bestaat uit drie onderdelen en een optioneel scherm. Uiteraard een gashendel en verder een contactslot en informatiepaneel. Al deze onderdelen zijn onderling verbonden met elkaar en met de motorcontroller die bovenop de E-line motor zit.

Ons systeem heeft ook het optionele Vetus touchscreen met kaarten. Op dit scherm zie je ook de informatie van de motor, zoals het toerental en de temperatuur, alsmede het opgenomen vermogen uit de accu’s en de resterende capaciteit. Wat heel tof is dat het systeem op basis van je huidige vermogen uitrekent hoelang je nog (bij gelijke condities) kunt varen.
CAN-bus
Je hebt me al een aantal keren horen praten over CAN-bus. CAN-bus (Controller Area Network) is een communicatiesysteem dat vooral wordt gebruikt in auto’s om ECU’s (Electronic Control Units) met elkaar te laten communiceren. De CAN-bus maakt bijvoorbeeld snelle en betrouwbare informatie-uitwisseling mogelijk tussen het gaspedaal en de motor van je auto.

Voor ons was dit een van de redenen om te kiezen voor Vetus E-line motoren omdat het een indicatie kan zijn voor een goed geëngineerd systeem. Analoog werkt ook prima, maar ik weet nog uit eerdere eigen ervaring dat een gashendel met potmeter beïnvloed kon worden door een magnetisch veld.
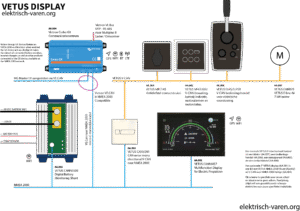
Onze oplossing om elektrisch te kunnen varen is misschien wat aan de complexe kant voor een simpele sloep, maar het viel me op hoe goed en stabiel het functioneert. En het is goed gedocumenteerd dus de complexiteit viel me nog mee. Welke CAN-bussen vind je terug op Cornelis:

1. Victron VE.Can: een op RJ45 gebaseerd CAN-bus netwerk voor Victron devices. Wij gebruiken VE.Can om het MG BMS met de Cerbo GX te laten praten. Het is compatibel met NMEA2000.
2. MG BMS CAN: een CAN-bus netwerk waarmee de MG accu’s en het MG BMS Master LV met elkaar praten. Ik weet niet exact wat de onderliggende CAN-bus specs zijn.
3. Vetus V-CAN: een CAN-bus ontwikkeld door Vetus om motoren, boegschroeven en andere systemen met elkaar te laten communiceren. De gashendel, het contactslot en informatiepaneel en de E-line motor praten V-CAN met elkaar.
4. NMEA2000: dit is de de facto standaard voor onderlinge communicatie tussen marine devices. Van kaartplotter en gps tot auto-pilot. Onze oplossing heeft een brug tussen het V-CAN systeem en NMEA2000. Het NMEA2000 Vetus scherm wordt zo voorzien van informatie op de NMEA2000 bus (via onder andere de NMEA2000 Vetus shunt) en motor van de V-CAN bus.
Daarnaast gebruiken we ook nog niet CAN-bus koppelingen zoals 5. VE.Bus (RS485) om de Cerbo GX te laten praten met de Victron Multiplus II lader en 6. VE.direct (RS232) om de Victron SmartShunt van ons 12 V systeem remote uit te kunnen lezen.
Zoals eerder gezegd; het is wat over-the-top. Wil je alleen de motor gebruiken icm met een simpel accupakket, dan voldoet het gele stukje CAN-Bus (3). Wil je meer info op een scherm, dan krijg je er een stukje NMEA 2000 bus (4) bij. De rest van de componenten in het schema hebben te maken met de Victron-MG accu-laad combinatie. Heel mooi, maar ook een tikkie onnodig complex.
Lees verder over de VETUS E-Line motor in deel 4.